This robotic flight demonstration marks the newest achievement of the Artificial and Mechanical Intelligence (AMI) Lab at IIT in Genoa under the leadership of Daniele Pucci. Their research focuses on advancing the frontiers of multi-modal humanoid robotics by integrating ground-based locomotion with aerial mobility to create robots capable of functioning in unstructured and extreme environments. Image credit: IIT-Istituto Italiano di Tecnologia
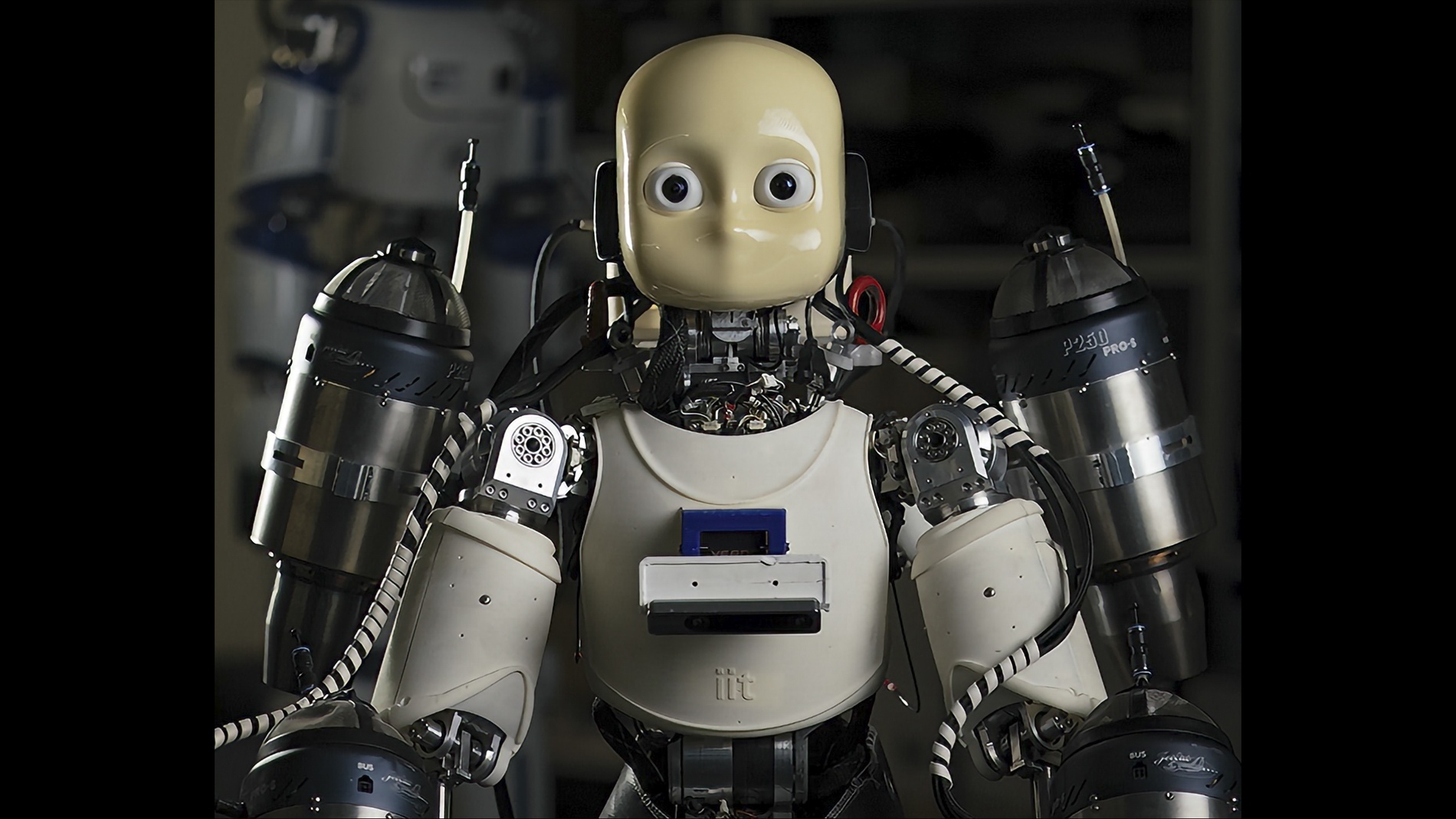
iRonCub3 is the technological evolution of previous prototypes and is based on the latest generation of the iCub humanoid robot (iCub3), developed to be teleoperated. It integrates four jet engines, two mounted on the arms and two on a jetpack attached to the robot’s back. Image credit: IIT-Istituto Italiano di Tecnologia