Construction of a Robotic Arm by T. Migimatsu – Stanford Ph.D. Student
″Do you know a human arm has more than 100 dimensions of movement?″
″Do you know what makes a robotic arm move?″
″Do you know what academic subjects are most required if you want to build a robot?″
When I sat down to interview Toki Migimatsu (右松孝齊), a PhD student in Computer Science at Stanford University, I was amazed to learn that the human arm is capable of more than 100 dimensions of movement and Toki has managed to map them all.

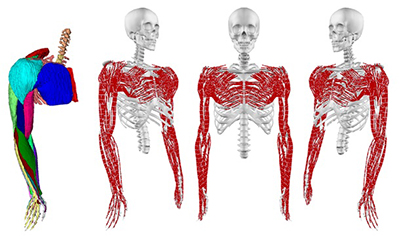
How did he do that? First he studied how muscle fibers work in a human arm. He then used MRI to collect 3D images of arm muscles in various configurations, resulting in over one terabyte of data. From this data, he constructed a computer model of the arm that simulated the contraction of muscle fibers as the arm moved about. This model used efficient algorithms from robotics to be able to predict the muscle forces in real-time. This was Toki′s undergraduate study.
In a separate use of the MRI machine, he then used fMRI to scan brain signals as the subject moved his arms around. The goal was to find a correlation between the brain signals and muscle activations – in other words, to understand how the brain controls muscles. This is where the muscle model came in. Because there is no way to simultaneously record brain signals and muscle activations in the MRI, a position and force sensor was attached to the subject′s hand, and the model was able to predict muscle activations from these position and force readings.
Understanding how the brain controls muscles would have a significant impact on neurological surgery, musculoskeletal surgery, and physical rehabilitation. Furthermore, because the muscle model is compatible with robotics algorithms, it could be integrated with robot exoskeletons or personal robot assistants that need to interact closely with humans.
For Toki, his childhood hobbies included building with legos, the bigger the block constructions the better. He also liked to take apart old electronics to see how they worked and then put them back together again. However, he was not totally left-brained. He also spent a few hours every day practicing piano. His piano playing reached the highest certificates of merit when he was in early high school. Learning how to write software came much later, not until he was a freshman at Stanford.
As an undergraduate student majoring in Computer Science, the most challenging part was the rigorous pace of the Stanford curriculum. The required time of studying and homework was overwhelming to him. He spent on average just six hours a day sleeping, and sometimes just four hours when he decided to play the piano to take his mind off of studying.
What subjects are most needed when it comes to constructing a robotic arm? Toki thinks advanced mathematical skills are needed in developing algorithms and in-depth knowledge in physics is required when it comes to building the robot.
Toki spent last summer as an intern at the Autonomous Driving Division of Nissan. Now he wants to focus more on AI during his graduate studies. His goal is to develop better algorithms for robots to interact with the physical world. He hopes one day to build a smart robot that is capable of handling the many tasks in our daily lives. ″Wouldn′t it be nice if a robot could wash dishes or clean the house one day?″ asked Toki with a smile.